python实现CSF地面点滤波算法原理解析
一、算法原理
布料模拟滤波处理流程:
1)利用点云滤波算法或者点云处理软件滤除异常点;
2)将激光雷达点云倒置;
3)设置模拟布料,设置布料网格分辨率 G R GR GR,确定模拟粒子数。布料的位置设置在点云最高点以上;
4)将布料模拟点和雷达点投影到水平面,为每个布料模拟点找到最相邻的激光点的高度值,将高度值设置为 I H V IHV IHV;
5)布料例子设置为可移动,布料粒子首先受到重力作用,当粒子高度 C H V CHV CHV小于 I H V IHV IHV时,将粒子高度设置为 I H V IHV IHV;粒子设置为不可移动;
6)计算布料粒子之间的内力作用,根据设置的布料刚性参数,调整布料粒子之间的相对位置;
7)重复进行5)和6)计算,迭代次数达到设置的最大迭代次数;
8)计算激光雷达点与对应布料模拟点的距离,距离小于阈值标记为地面点,距离大于阈值标记为非地面点。
点云地面点滤波(Cloth Simulation Filter, CSF)“布料”滤波算法介绍
二、读取las点云
参考链接: python读取las
1、GitHub: laspy
2、基础教程:Laspy: Documentation
3、安装:pip install laspy
4、使用example:
import laspy
#============读取las格式的点云===========
inFile = laspy.file.File(r"40m1.las", mode='r') # 读取点云
print('X,Y,Z',inFile.x,inFile.y,inFile.z) # 输出点云坐标
print('点云个数:',len(inFile)) #读取点云个数
#============保存点云为las文件===========
h = inFile.header
outFile = laspy.file.File('666.las', mode = "w", header=h)
points = inFile #对点云进行的相关操作
outFile.points = points
outFile.close() #关闭文件完成保存
三、算法源码
1、算法细节:CSF
2、源码获取:https://github.com/jianboqi/CSF
3、源码编译:下载源代码。在python文件夹下:
python setup.py build
python setup.py install
4、读取las并可视化算法结果
import laspy
import CSF
import numpy as np
import open3d as o3d
#============读取las文件=============
inFile = laspy.file.File(r"40m1.las", mode='r') # read a las file
points = inFile.points
xyz = np.vstack((inFile.x, inFile.y, inFile.z)).transpose() # extract x, y, z and put into a list
#============布料模拟滤波============
csf = CSF.CSF()
# 参数设置
csf.params.bSloopSmooth = False #粒子设置为不可移动
csf.params.cloth_resolution = 0.1 #布料网格分辨率
csf.params.rigidness = 3 #布料刚性参数
csf.params.time_step = 0.65
csf.params.class_threshold = 0.03 #点云与布料模拟点的距离阈值
csf.params.interations = 500 #最大迭代次数
# more details about parameter: http://ramm.bnu.edu.cn/projects/CSF/download/
csf.setPointCloud(xyz)
ground = CSF.VecInt() # 地面点索引列表
non_ground = CSF.VecInt() # 非地面点索引列表
csf.do_filtering(ground, non_ground) # 执行滤波
#============保存为las文件==========
outFile = laspy.file.File(r"non_ground.las",
mode='w', header=inFile.header)
outFile.points = points[non_ground] # 提取非地面点保存到las
outFile.close() # 关闭文件夹
a=xyz[ground]
b=xyz[non_ground]
#=============可视化===============
def view_cloud(a, b):
pcd = o3d.geometry.PointCloud()
# =====numpy转point=======
pcd.points = o3d.utility.Vector3dVector(a)
pcd1 = o3d.geometry.PointCloud()
pcd1.points = o3d.utility.Vector3dVector(b)
#=======自定义颜色========
pcd.paint_uniform_color([0, 1, 0])
pcd1.paint_uniform_color([1, 0, 0])
o3d.visualization.draw_geometries([pcd, pcd1],window_name='提取结果')
o3d.visualization.draw_geometries([pcd1],window_name='非地面点')
o3d.visualization.draw_geometries([pcd],window_name='地面点')
view_cloud(a,b)
5、读取pcd文件并可视化结果
import open3d as o3d
import CSF
import numpy as np
pc = o3d.io.read_point_cloud("数据//100m1.pcd")
xyz = np.asarray(pc.points)
csf = CSF.CSF()
# prameter settings
csf.params.bSloopSmooth = False
csf.params.cloth_resolution = 0.1
csf.params.rigidness = 3
csf.params.time_step = 0.65
csf.params.class_threshold = 0.03
csf.params.interations = 500
# more details about parameter: http://ramm.bnu.edu.cn/projects/CSF/download/
csf.setPointCloud(xyz)
ground = CSF.VecInt() # a list to indicate the index of ground points after calculation
non_ground = CSF.VecInt() # a list to indicate the index of non-ground points after calculation
csf.do_filtering(ground, non_ground) # do actual filtering.
# o3d.io.write_point_cloud("trans_of_source.pcd", non_ground)#保存点云
a=xyz[ground]
b=xyz[non_ground]
def view_cloud(a, b):
pcd = o3d.geometry.PointCloud()
# From numpy to Open3D
pcd.points = o3d.utility.Vector3dVector(a)
pcd1 = o3d.geometry.PointCloud()
# From numpy to Open3D
pcd1.points = o3d.utility.Vector3dVector(b)
pcd.paint_uniform_color([0, 1, 0])
pcd1.paint_uniform_color([1, 0, 0])
o3d.visualization.draw_geometries([pcd, pcd1],window_name='提取结果')
o3d.visualization.draw_geometries([pcd1],window_name='非地面点')
o3d.visualization.draw_geometries([pcd],window_name='地面点')
view_cloud(a,b)
四、结果展示

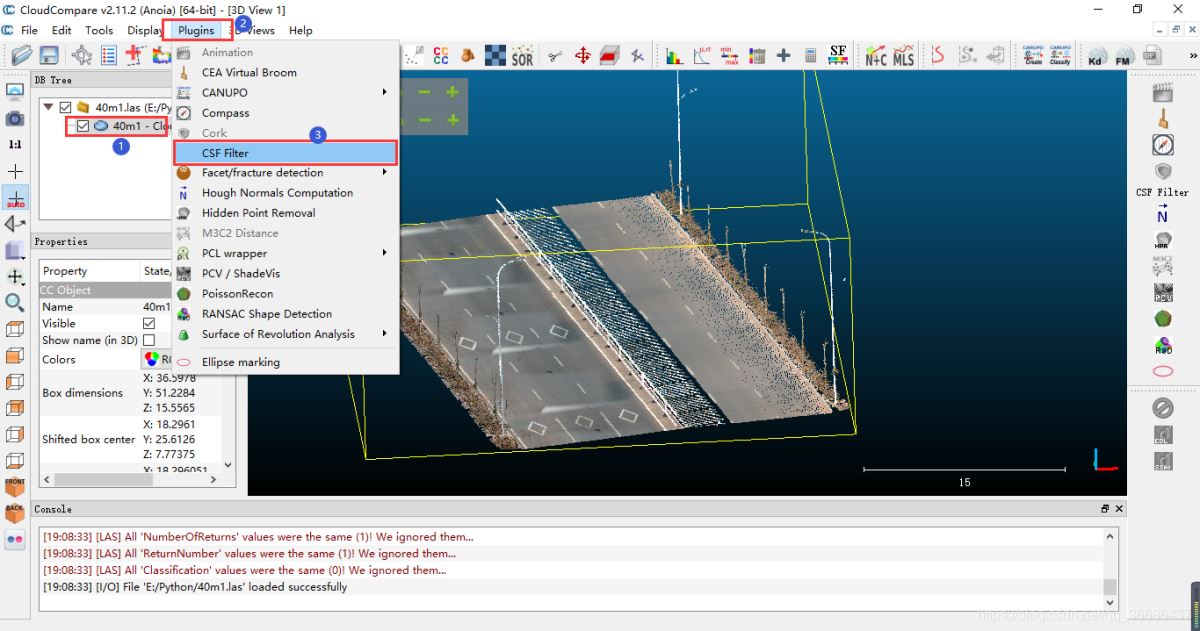
五、CloudCompare实现
1、加载点云数据,点击Plugins中的CSF Filter功能
2、弹出如下窗口:
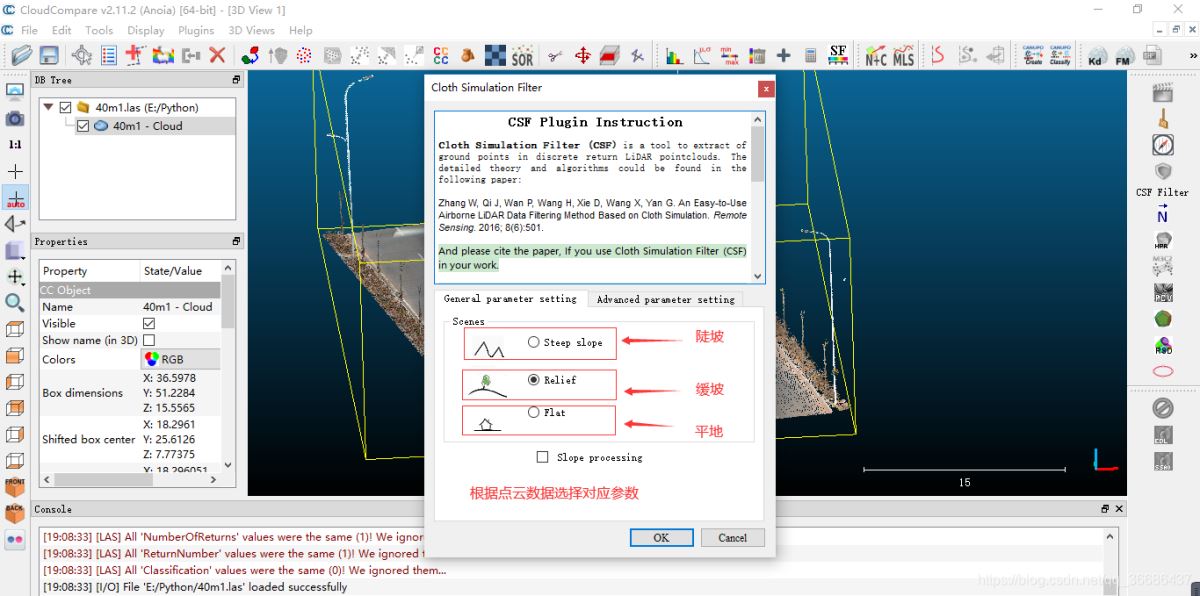

图中:Cloth resolution:是指用于覆盖地形的布的网格大小(单位与点云的单位相同)。你设置的布分辨率越大,你得到的DTM就越粗糙;Max iterations:是指地形仿真的最大迭代次数。500对大多数场景来说都足够了。Classification threshold:是指根据点与模拟地形之间的距离,将点云划分为地面和非地面部分的阈值。0.5适用于大多数场景
这里的网格分辨率和距离阈值最小只能设置为10cm,地面10cm的范围默认是地面点,精确度不如自己代码实现中的高。
3、最后得到的结果:
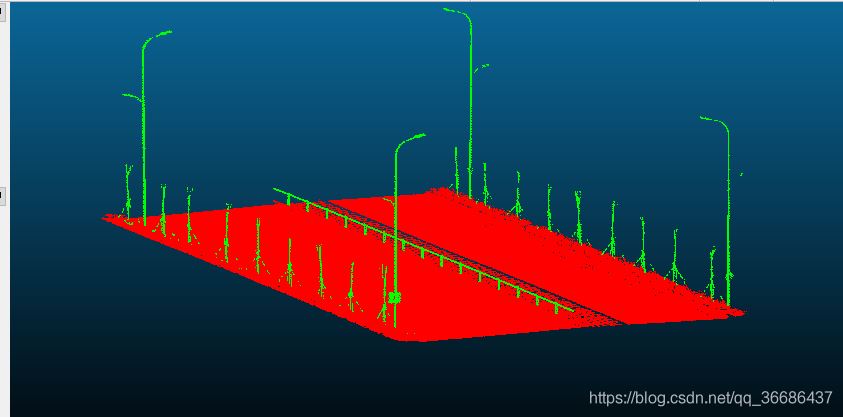
可以看出,非地面点中不能提取到路缘石。
到此这篇关于python实现CSF地面点滤波的文章就介绍到这了,更多相关python地面点滤波内容请搜索猪先飞以前的文章或继续浏览下面的相关文章希望大家以后多多支持猪先飞!
相关文章
- 这篇文章主要介绍了python-opencv-画外接矩形框的实例代码,代码简单易懂,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下...2021-09-04
Python astype(np.float)函数使用方法解析
这篇文章主要介绍了Python astype(np.float)函数使用方法解析,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友可以参考下...2020-06-08- 2022虎年新年即将来临,小编为大家带来了一个利用Python编写的虎年烟花特效,堪称全网最绚烂,文中的示例代码简洁易懂,感兴趣的同学可以动手试一试...2022-02-14
- 在本篇文章里小编给大家分享的是一篇关于python中numpy.empty()函数实例讲解内容,对此有兴趣的朋友们可以学习下。...2021-02-06
python-for x in range的用法(注意要点、细节)
这篇文章主要介绍了python-for x in range的用法,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧...2021-05-10- 这篇文章主要介绍了Python 图片转数组,二进制互转操作,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧...2021-03-09
- 这篇文章主要介绍了Python中的imread()函数用法说明,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧...2021-03-16
- 这篇文章主要介绍了python如何实现b站直播自动发送弹幕,帮助大家更好的理解和学习使用python,感兴趣的朋友可以了解下...2021-02-20
python Matplotlib基础--如何添加文本和标注
这篇文章主要介绍了python Matplotlib基础--如何添加文本和标注,帮助大家更好的利用Matplotlib绘制图表,感兴趣的朋友可以了解下...2021-01-26- 这篇文章主要介绍了解决python 使用openpyxl读写大文件的坑,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧...2021-03-13
- 今天小编就为大家分享一篇python 计算方位角实例(根据两点的坐标计算),具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧...2020-04-27
- 这篇文章主要为大家详细介绍了python实现双色球随机选号,文中示例代码介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们可以参考一下...2020-05-02
- 在本篇文章里小编给大家整理的是一篇关于python中使用np.delete()的实例方法,对此有兴趣的朋友们可以学习参考下。...2021-02-01
- 这篇文章主要介绍了使用Python的pencolor函数实现渐变色功能,本文通过实例代码给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下...2021-03-09
- 这篇文章主要介绍了python自动化办公操作PPT的实现,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧...2021-02-05
Python getsizeof()和getsize()区分详解
这篇文章主要介绍了Python getsizeof()和getsize()区分详解,文中通过示例代码介绍的非常详细,对大家的学习或者工作具有一定的参考学习价值,需要的朋友们下面随着小编来一起学习学习吧...2020-11-20- 这篇文章主要为大家详细介绍了python实现学生通讯录管理系统,文中示例代码介绍的非常详细,具有一定的参考价值,感兴趣的小伙伴们可以参考一下...2021-02-25
- 这篇文章主要介绍了PyTorch一小时掌握之迁移学习篇,本文给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下...2021-09-08
- 这篇文章主要介绍了解决python 两个时间戳相减出现结果错误的问题,具有很好的参考价值,希望对大家有所帮助。一起跟随小编过来看看吧...2021-03-12
- 这篇文章主要介绍了Python绘制的爱心树与表白代码,本文通过实例代码给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下...2021-04-06